
こんにちは、情報工学科2年の淵山です。
前回の中村くんから引き続き、
今回は二足歩行ロボットの仕組みについて書かせていただきます。
ボク達が使うロボットはこちら。KHR-2HVという機体。
「新横KID」と名付けています。
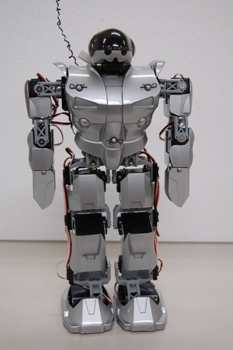
こけたときのショックを和らげるためと、コードがひっかからないように、
ポリカーボネート製の外装を着けています。
このロボットは各関節にサーボモータという部品を用いています。
サーボモータとは、自分の動作状態を常に確認し、フィードバック機構を利用して、指令とのずれが出るとすぐに修正してずれを直すかしこいモータです。
〔サーボモータ〕

このサーボモータで17箇所もの間接が稼動するようになっており、
各関節の稼動範囲を微調整する事により、様々なポーズをとらせる事が可能になります。
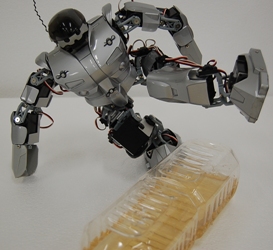
スムースな二足歩行以外にも、なんと腕立て伏せや側転、回し蹴り、勝利のポーズ、
果てはY字バランスまでもこなしてしまいます。
〔回し蹴り〕

〔回し蹴りでペットボトルを倒した〕
〔勝利のポーズ〕

〔Y字バランス〕

ロボットを制御するには、パソコンを利用して、
行動内容をロボットに学習させていく事が必要になってきます。
この学習させる行動内容を構築していくことこそが、
ボク達が目的としているロボットコンテストの重要なポイントとなってきます。
一歩前進させるだけでも各関節の細かい調整をすることにより、
カクカクとした歩行になったり、
はたまた流れるような足運びになったり・・・
コンテストではゴールまでのスピードを競うので、
この「微調整」という作業に悩まされる毎日になっています。
また、コンテストでロボットを操作する際に
無線を利用して遠隔操作をしていく事になるのですが、
この遠隔操作一つをとっても、
練習を積まなければコツを掴む事ができないため、
コンテスト本番までにどれだけ操作に慣れるかも重要なポイントになってきます。
ロボットに行動内容(モーション)を学習させていくことについては、次々回の、情報工学科ブログ:ロボコンへ向けて【006】で、和田君がお話をしてくれると思います。お楽しみに!!
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/779