
2007年12月14日
■ ロボコンへ向けて【007】二足走行ロボット:動かし方の話
こんにちは、情報工学科2年の和田です。
前回の淵山くんから引き続き、
今回は二足歩行ロボットの動かし方について書かせていただきます。
ロボットを動かす原理はパラパラマンガと同じで、ある姿勢から次の姿勢へと順番に移行させていくことでロボットの動き(モーション)をつくります。
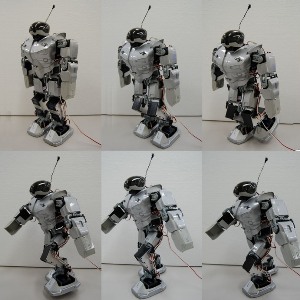
このようにして作った複数の姿勢(「左足を前に振る」「左足を踏み込む」・・・を実行順番を考えながらつないでいくことにより、「ロボットを歩かせる」というモーションができあがります。
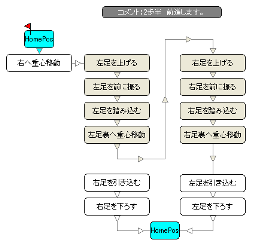
〔ロボットを歩かせる動作〕
同様にして、腕立て伏せ、側転、回し蹴り、勝利のしぐさなどを作ることができます。
ついついモーションにばかり注目しがちですが、実は一番重要なのは、初期状態の立ち姿勢です。これをホームポジションといいます。
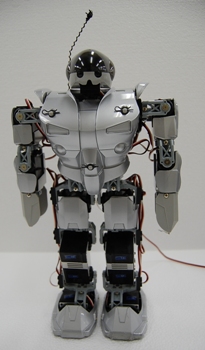
〔ホームポジション〕
この姿勢がずれていると、二足歩行でバランスを崩して倒れたり、変な場所に力が加わってモータをいためたりします。
このホームポジションを丁寧に調整する(トリムといいます)ことが一番のキモのようです。調整しながら動かして修正し、また調整しては動かして修正し、・・・これを何度も繰り返すことによってようやくひとつの動作ができるわけなのです。
直前までゲートの潜り抜けや、卵型物体の持ち上げに苦戦しました。充電池が30分そこそこで切れてしまうのが残念です。ここまできたらぎりぎりまで頑張ります。
投稿者 iscs_blog : 2007年12月14日 13:33
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/796