
2007年12月15日
■ ロボコンへ向けて【008】自律走行ロボット:走行状態良好です
こんにちは、情報工学科2年の藤原です。
今回は、コースの走行状況について書きたいと思います。
作成を始めてからレゴマインドストーム、C言語とプログラムを変えてきましたが、
最初の頃に比べて、着実にゴールするまでの時間が短かくなってきました。
機体ごとに、パーツに癖があったりして、まっすぐ走らせているつもりなのに、
徐々に右や左に逸れていってしまうことがあります。
そこで、プログラムで左右のタイヤの速度を少しずつ調整していきます。
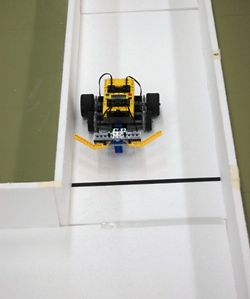
まっすぐ進んでいるとこんな感じ。
ちょっとした傾きに見えても、コース完走にはかなりの影響が出てきます。
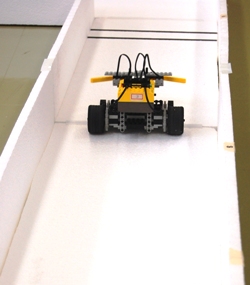
左右の壁にぶつかってしまうと方向修正のたびに時間がかかり、最悪の場合コーナーで完全に曲がれなくなってしまい、大きなタイムロスになってしまいます。
現在では、調整を重ねて安定して走っています。まっすぐ、きっちり。
ただ、電池の状態にもよるので、油断はできませんが・・・

なお、コースは3年生の先輩方が作ったものを使用させてもらってます。感謝。
先日行われた自律型ロボット出場チームの学内選考会で晴れて優勝!となったので、
16日の全国大会に出場できることになりました。ここまできたら入賞目指してがんばります。
投稿者 iscs_blog : 2007年12月15日 15:34
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/797