
最後にリーダの淵山です。
早いもので、半年があっという間に過ぎてしまい、
もうコンテスト本番を迎えます。
順調であったようでもあり、これではとても・・・・
と思うときもありました。
体育館の半面をフルにカバーするセンサーシステムは思った以上に大変でした
16個の超音波センサーを作り上げ、試し、調整し、修理し、
つなぎ合わせるには電圧ケーブル網、信号ケーブル網をつくり、
それらを合流させたり分流させたりするターミナルやコネクタをつくり
16個のセンサーから集めたシグナルを処理するマイコン基板をつくりました。
8月にとりかかってから、システムとしてちゃんと動きだすまで3カ月近くかかりました。

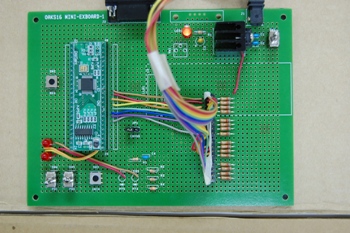
↑超音波センサーシグナル処理基板(USMPU)
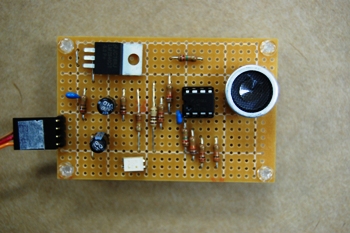
↑超音波センサー
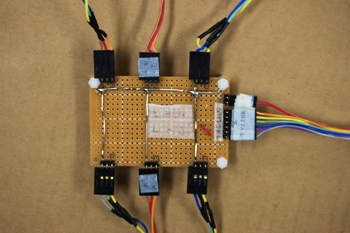
↑センサーターミナル
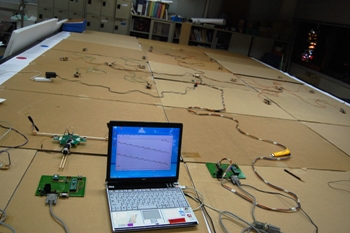
↑日産スタジアムそばの研究室に広げたセンサー網

↑横浜アリーナそばの体育館に展開したセンサー網
MDDロボットチャレンジ飛行船コンテストでは、
飛行競技だけでなく成果物(ソフトウエア)のモデリングの審査もあります。
その提出モデルは、10月17日提出締切時間の数秒前に
タッチの差で受け取ってもらえたと仲久保先生が言っていました。
今年は、モデルを実際に検証できるこのセンサーシステムが一番の成果だよとも。
しんどかった時期もありますが、最近は、
やったことが形になり、先週よりも今週は確実に手応えがある。
そんな日々が続いています。
最後に情報工学科担当教員の仲久保です。
今年も夏休みが終わるころには、どうなることかと思いましたが、
今年のチームの仕上がり具合は素晴らしいです。
ひとつひとつクリアしてきて、残すは自律飛行ソフトのみ。
「今年は上位入賞しか考えていないよ」が最近の口癖です。
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/1298