
どうもこんにちは。
情報工学科3年のペンネーム「二等兵」です。
今回のロボコンへ向けて【002】では、全国専門学校ロボット競技会で使用されるコースの製作についての話をしたいと思います。
まずは、レゴを使った「自律走行(ソフトウエア)競技」です。
この競技はLEGO-MINDSTORMSの入門編に出てくるローバーボットに似たレゴカーで、指定されたコースをいかに速く走るかを競うタイムトライアルです。
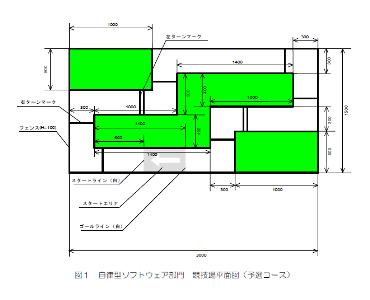
予選コースは1.5m×3.0mの長方形の競技台の中に高さ10㎝のフェンスでレイアウトされています。コースの幅は30㎝で直線と直角コーナーで構成されます。各直角コーナーの10㎝手前のコース床面には、右コーナー、左コーナーを識別するマーキングが施されています。
詳しくはこちらをご覧ください。
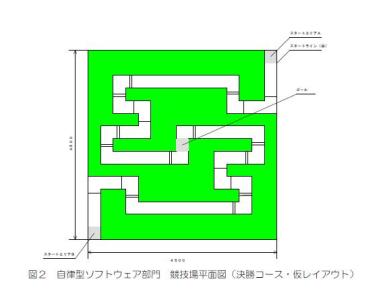
決勝コース(仮)は4.5m×4.5mの競技場内に中央のゴールを軸に点対称なセパレートコースで、高さ10㎝のフェンスでレイアウトされています。実は決勝コースは予選日当日まで実際のレイアウトは公表されませんので、本物は多少違うだろうと思われます。
(予選コース)
(決勝コース(仮))
コースを作るにあたり、加工のしやすさとコストを考えて、発泡スチロールの板を使うことに決めました。発泡スチロール板の加工には熱で溶かして切る方法とナイフで切る方法を試しましたが、最終的にはナイフで切ることにしました。
このときとても役に立ったのは、キャビネットの底板です。これを定規代わりにし、また厚さ方向の角度を垂直に固定するためのガイドとして使いました。


使うときには組み立てやすく、使い終わったら分解しやすいように、全体を4~6のエリアに分け、コースの設計図面と部品表を書いてからパーツを切り出して組み立てました。
これで普段は何事もない4階フロアーが2分でレーシングコースに早変わりです。
(予選コース)

右側の中央部分からスタートして1周するコースです。
(決勝コース(仮))

左の最奥部がスタート地点で、右の最奥部がゴール地点です。
次に「二足歩行ロボット競技」です。
この競技は予選、決勝とも、障害物のあるコースを無線リモコン型の二足歩行ロボットで走破するタイムトライアル競技です。コースは、以下のようになりました。
(予選コース)
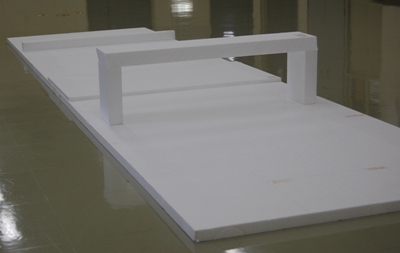
手前から奥に向かって二足歩行で進みます。最初のゲートをくぐり、次の段差を越え、最後に障害物を乗り越えてゴールです。最初のゲートくぐりが難しいです。
(決勝コース)
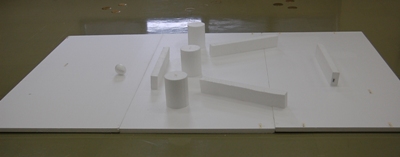
決勝では、おにぎりの様な物体を抱えて(持って)走る障害物競走になります。左側からスタートして右端のゴールを目指します。物を持って障害物を避けながら走るところが難しいです。
コースの詳細仕様は、こちらをご覧ください。
今回は自作したコースについてお話をしました。これは、本番と同様のコースで練習を繰り返すことが勝利への道であると思っているからです。
次回「ロボコンへ向けて【003】」では自律走行競技で使う車体について、中村君がお話しをしてくれます。
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/769