
お久しぶりです。医療担当の小松です。
早いもので、2007年もあと2日となりました。
今年一年このブログをご覧頂いた皆様どうもありがとうございましたm(__)m
年末の慌しい中ですが、昨日新横浜校では職員全員で大掃除をして、新たな年を迎える準備を整えました。これで年明けはキレイな学校で皆さんをお迎えできますっO(≧▽≦)O
ご来校おまちしてます!!

来年も皆様にとって素晴らしい一年になりますように新横浜校一同お祈りしております。
そして、来年もよろしくお願い致します!!ヽ(^◇^*)/
(誠に勝手ながら、12月29日(土)から1月7日(月)の午前中は、業務をお休みさせて頂いております。予めご了承下さいませ。)
新横浜の情報工学科担当:仲久保です。
12月8日の新横学内選考会を勝ち抜いたチームHのマシンが「新横Rover」として12月16日の全国大会の自律走行ロボットソフトウエア部門に出場しました。

学校の発泡スチロール製のコースでは56~58秒台を出していましたが、大会のコースでは、1回目54秒,2回目53秒,3回目51秒と縮めることができ、予選を通過しました。大会コースは木製の板に塗料塗りで表面がざらざらしており、タイヤのグリップが大きくその分推進力が増したようです。
藤原・中村チームの「新横Rover」は、カーブでの直角ターンが特徴で、サッサッ、スッスッときれいに曲がるので会場から歓声が上がっていました。
準決勝では強豪(予選1位通過)の日本電子専門学校「MASAMITI号」とのガチンコ勝負でしたが、なんとか下して決勝戦へ進みました。
決勝戦では日本工学院八王子専門学校の「まいん」号とガチンコ勝負になりました。ほとんど同じスピードでしたがゴール寸前0.5秒くらいの差で負けました。
結果を見ると、日本工学院八王子専門学校、日本電子専門学校というこの分野の大先輩校に混じって、初参加ながら準優勝できたのは上出来だと思います。
一方、二足歩行ロボット部門に出場した「新横KID」についてもお話しておきます。

初めて取り組む二足歩行ロボットなので、いろいろなトラブルに見舞われました。直前1週間の間にも、激しい動きのために肩の関節が動かなくなり調べてみるとサーボモータのギアが破損していました。
蓄電池は1日1回の充放電という使い方では、大でも30分、小では15分くらいしかもたず、1日あたりの練習量が不足しがちでした。さすがに直前1週間は1日に2,3回は充放電しましたが、とうとう電池がへこたれました。
大会前日には新しい蓄電池を2本用意しました。会場で新品に交換したとたん電池が高温になり発熱し周囲のカバーなどが解けてしまいロボットが動かなくなりました。急いで分解してもあせっているので原因がわからず半ばパニック状態です。落ち着け落ち着けといいきかせながら打てる手を考えました。
リハーサルどころではなくなり、会場を抜け出して秋葉原のなじみのショップで工具を借りて落ち着いて調べて修理をしたところ復旧できました。ケーブルの皮膜が連日の激しい練習ではがれショートして大電流が流れ、そのために電池が激しく発熱したようです。幸いサーボモータや基板は無事で大事にはいたらずに済みました。一時はどうなることかと頭の中が真っ白になりましたが、リタイアせずに済みました。
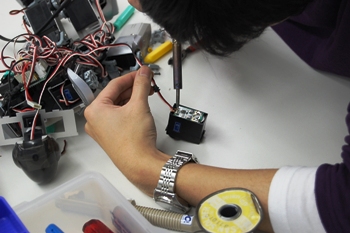
(サーボモータの基板側の配線を修理中)
しかしながら、もう外は暗く、会場は閉まってしまいました。学校と違って新宿では練習場所がないなーと思っていたら、学生諸君はカラオケボックスにロボット一式を持ち込んで、一晩練習に明け暮れたそうです。
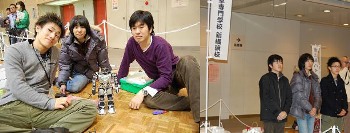
本番の日は朝早くから会場入りし、睡魔に打ち勝って直前まで調整をつづけていました。

そうして向かえた本番です。強豪校相手によく戦っています。ゲートを背面くぐりで通り抜けるアイデアなんか独特です。手に汗にぎり、はらはらしてみているうちに、カメラで写真をとるのも忘れていました(でもビデオはしっかりとりました)。せっかくの勇姿をのせられなくてゴメン。
想定される課題をひとつひとつクリアして順調に準優勝まできた新横Roverはもちろん立派ですが、直前の何度も訪れた予期せぬ困難をあきらめずに克服し、よくぞ他の強豪校と互角に戦えるくらいのところまでもってきた新横KIDも立派でした。ここでも「最後まであきらめない気持ち」を見せられました。
閉会式では、このような機会をあたえていただいた主催者とスタッフに感謝の気持ちで一杯になりました。
こんにちは。情報工学科2年の井沼です。
先日の15、16日に新宿の工学院大学専門学校で行われた、第16回全国専門学校ロボット競技会「スチールファイト」の大会の様子について書かせていただきます。
僕たちは2足歩行ロボットの競技に参加しました。
初日の15日は、ロボットの車検と試走がありました。
車検です。クリアするとシールが貼られます。

本番と同じコースで試走です。コースの材質に合わせて足裏の滑り止めを調節します。

2足歩行の競技は予選競技と本戦から構成されていて、予選競技はROBOT ATHLTICSE。障害物を乗り越えて競うタイムレースです。二足歩行ロボットの制御技術とスピードが求められます。
2足歩行ロボット予選の競技のコースです。
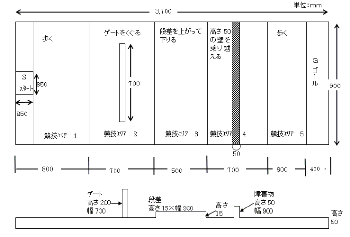
競技エリアが1から5まであり、そのうち1と5は歩行エリアで、2、3、4はそれぞれ障害物のあるエリアになっています。
僕たちのロボットは、競技エリア2のゲートの手前で後ろ向きになり、背面から倒れこんでゲートを潜り抜ける独特の方法をとりました。練習ではうまくいっていたのに本番ではあせってしまい微妙に位置がずれて1回では成功せず時間を食ってしまいました。
また、競技エリア4の高さ5cmの障害物でも阻まれ、時間切れで完走することができなく、予選落ちしてしまいました。僕たちの目標が予選突破だったので、非常に悔しい思いをしました。
この経験を活かして、次回も参加できるのであればレベルアップして大会に臨みたいと思います。
こんにちは、情報工学科2年の藤原です。
今回は、大会当日の様子について書きたいと思います。
先日 15、16日に行われた全国専門学校ロボット競技会に行ってきました。
僕は、自律走行型ロボット(ソフトウェア)部門での参加です。

さすがに、全国から集まってきているので会場は結構広いです。
参加校によっては、何チームも出場しているところもあるので、
用意されたピット(各学校に用意されたスペース)内はすごく混雑していたりします。
予選のほうは、同じ時間に二つの種目が同時進行していて、
ソフトウェア部門は予選で三回走るので、走行前の控えている時間は、
端のほうで待っているため、他の競技があんまり見られませんでした。
二足歩行や自律型ハードウェア部門などの競技が始まると、注目が集まるんですが、

ソフトウェア部門は、全チーム同じ機体でどれだけ早くできるかを競うので、
とても地味でした。見た目も小さいし。パフォーマンスとかあったらなぁ。
ともあれ、いままでの練習の甲斐合って、予選は順調に走ることができ、
24チーム中5位のタイムで、みごと決勝トーナメントへ勝ち進むことができました。
予選タイム 大会基準として、1分以内の完走を目指しています
一回目 55秒
二回目 52秒
三回目 51秒 (小数点以下は四捨五入)
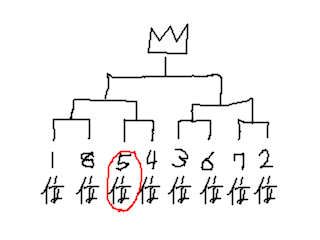
決勝トーナメントは、1位vs8位のように順位が低いほうが不利になっていて、
僕たちは、4位と対戦することになりました。予選のタイムはあまり差がありません。
対戦相手ともども、いまいち走りが安定せず、ミス連発。
相手のミスに助けられ勝ち進む形となってしまいました。運も実力のうちってことで。
最後の最後、決勝戦で本調子に戻り、かなりいい勝負になりました。
二回ともあと少しの所で負けてしまいましたが、ほぼ全力を出せたので満足しています。
結果として、準優勝になることができました。


今までありがとうございました。
二足歩行ロボットのほうは、次回、ブログ【010】で井沼くんが報告してくれます。
こんにちは、情報工学科2年の藤原です。
今回は、コースの走行状況について書きたいと思います。
作成を始めてからレゴマインドストーム、C言語とプログラムを変えてきましたが、
最初の頃に比べて、着実にゴールするまでの時間が短かくなってきました。
機体ごとに、パーツに癖があったりして、まっすぐ走らせているつもりなのに、
徐々に右や左に逸れていってしまうことがあります。
そこで、プログラムで左右のタイヤの速度を少しずつ調整していきます。
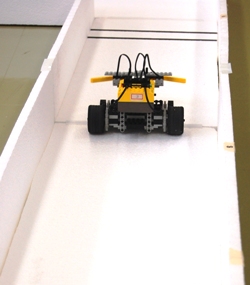
まっすぐ進んでいるとこんな感じ。
ちょっとした傾きに見えても、コース完走にはかなりの影響が出てきます。
左右の壁にぶつかってしまうと方向修正のたびに時間がかかり、最悪の場合コーナーで完全に曲がれなくなってしまい、大きなタイムロスになってしまいます。
現在では、調整を重ねて安定して走っています。まっすぐ、きっちり。
ただ、電池の状態にもよるので、油断はできませんが・・・

なお、コースは3年生の先輩方が作ったものを使用させてもらってます。感謝。
先日行われた自律型ロボット出場チームの学内選考会で晴れて優勝!となったので、
16日の全国大会に出場できることになりました。ここまできたら入賞目指してがんばります。
こんにちは、情報工学科2年の和田です。
前回の淵山くんから引き続き、
今回は二足歩行ロボットの動かし方について書かせていただきます。
ロボットを動かす原理はパラパラマンガと同じで、ある姿勢から次の姿勢へと順番に移行させていくことでロボットの動き(モーション)をつくります。
このようにして作った複数の姿勢(「左足を前に振る」「左足を踏み込む」・・・を実行順番を考えながらつないでいくことにより、「ロボットを歩かせる」というモーションができあがります。
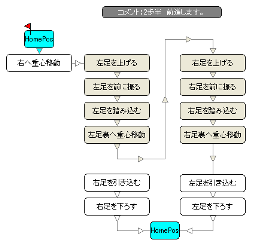
〔ロボットを歩かせる動作〕
同様にして、腕立て伏せ、側転、回し蹴り、勝利のしぐさなどを作ることができます。
ついついモーションにばかり注目しがちですが、実は一番重要なのは、初期状態の立ち姿勢です。これをホームポジションといいます。
〔ホームポジション〕
この姿勢がずれていると、二足歩行でバランスを崩して倒れたり、変な場所に力が加わってモータをいためたりします。
このホームポジションを丁寧に調整する(トリムといいます)ことが一番のキモのようです。調整しながら動かして修正し、また調整しては動かして修正し、・・・これを何度も繰り返すことによってようやくひとつの動作ができるわけなのです。
直前までゲートの潜り抜けや、卵型物体の持ち上げに苦戦しました。充電池が30分そこそこで切れてしまうのが残念です。ここまできたらぎりぎりまで頑張ります。
情報工学科担当 仲久保です。
12月8日(土)に新横浜2号館近くの横浜アリーナで「K1ファイト」が開催されました。
同じ日、K1に先立つ3時間前に、新横浜1号館では自律走行ロボット(ソフト)部門の選考会「新横ファイト」が開催され、8チームが12月16日への出場枠1つをめぐって熱戦を展開しました。
会場入り口です。

(代表者が出場を待つ緊張感あふれるピットです)

出場者が用意した自前のマシンでの走行タイム1と、
共通のマシンとして用意した標準機での走行タイム2と
それぞれを計測して、ベストタイムをチームのタイムとしました。
このようにしたのは、同じハードでもかならず個体差(クセ)があるので、
ハードウエアとしての個体差をなくしたソフトウエア競技とするために
同じハードウエアを使う手段をとってみました。
タッチスタート

コーナリング順調
一方で、乗り上げてしまったり
コーナでトラップされてしまったり・・・
というチームも出ましたが、全体的には自己ベストのタイムが続出しました
予選コースを58秒78で完走し、今回優勝したチームの代表
情報工学科2年の「藤原」くんです。
本番まであと1週間を切りました。最後の仕上げをして本番へ臨みます。
こんにちは。久々の登場!! 医療担当のコマツです。
メディカル情報科(医療事務科)では、患者さんへの癒しをテーマに、クリスマスリースを作成しました\(o⌒∇⌒o)/
しかぁし!! 12月16日(日)に診療報酬請求事務能力認定試験を受験するため、今が追い込みの時・・・ということで、午前中は模擬試験だったので真剣に電卓を叩いていました。

解答解説も終わり、やっと待ちに待ったリース作成です。
なかなかのセンスですねぇ~

こんな感じはどうでしょう

材料は、100円均一の物を多く使ってみました。
身近なものでお金を掛けずに工夫して作るという事も大切ですね☆
さて、出来上がりは・・・

こんなに素敵なリースができました!!
おトイレに飾るっ!!なんていう学生もいましたが、ぜひぜひお家の一番目立つところに飾ってくださいね(^^;;
医療従事者に必要なものは、コミュニケーション能力と臨機応変な対応です。
皆さんが病院にお勤めしたら、ぜひ患者さんのために作って下さいね!
患者さんの癒しのために、自ら進んで何かができる医療従事者になって下さい。
メディカル情報科(医療事務科)では、様々な視点から患者サービスができる人材を育成しています。
こんにちは、ふたたび情報工学科2年の中村です。
今回は自律走行ロボットのソフトウエアでの制御について書きたいと思います。
ロボコンへ向けて【003】でもお話しましたが、ハードウエアが同じでも走らせ方によって差が出ます。走らせ方は搭載するプログラムで決まります。いかにプログラムをうまく組み、ゴールするまでの時間を短縮するかボク達も毎日試行錯誤を繰り返しています。
ロボコンへ向けて【002】で青木さんがコース説明してくれましたとおり、コースは複雑になっていて右折、左折を何度もしないとゴールできません。ただモーターを回転させタイヤを動かすだけでは直進することしかできませんので右折、左折の判断が必要となります。
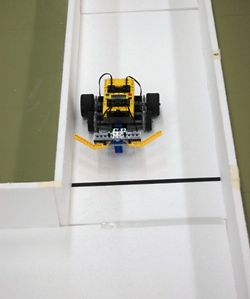
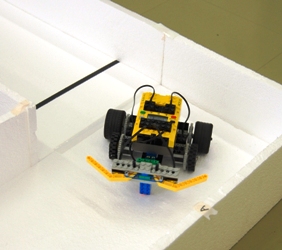
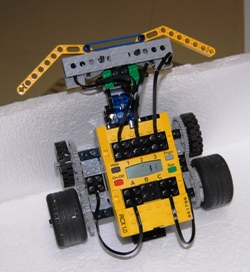
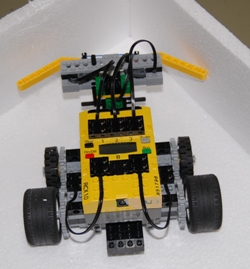
どう曲がるかと言いますと、コースのカーブ前には必ず黒い線が引かれていますのでこれを光センサー(車体の前方部分の青い場所)で感知して右へ左へ曲がるというわけです。
(光センサー)
黒い線が1本だったらモーター右部分の動きを止め、左のタイヤだけを動かし車体を90度傾かせ右折
(黒い線1本を感知したら右折)

黒い線が2本だったらモーター左部分の動きを止め、右のタイヤだけを動かし車体を90度傾かせ左折
(黒い線2本を感知したら左折)

こういった感じでカーブするわけです。
ですが毎回90度ぴったりにカーブし、ずっと真っ直ぐ走れるというわけではありません。
もし反れて壁にぶつかってしまった際はどうするのかと言いますと、少し車体をバックさせ、ぶつかったほうと反対側へ車体を傾かせるようにプログラムが組んであります。
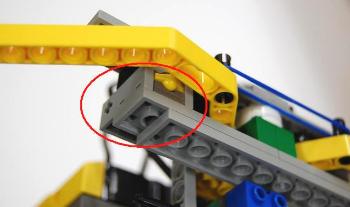
車体の先端の左右ににょきっと黄色い角のようなものがあるのが分かると思います。ここには左右に1つづつタッチセンサーが仕込まれていますので、壁に触れたことを感知することができるようになっています。
(タッチセンサー)
基本的には、直進、右折、左折、壁にぶつかったときの軌道修正、ができればいいわけですが、頭で考えたプログラム(理想)と、実際に走らせたときの様子(現実)とは、異なります。ここがパソコンの中だけで楽しめるバーチャルな世界と、パソコンの外にあるものを動かして楽しむリアルな世界との違いです。
まだボクたちの車体「新横Rover」も完全に走れるわけではないので更に改善していく予定です。
プログラムは、LEGO-MINDSTORMS-RCX附属のRCXコードと、フリーソフトのbrickOS-C言語で組んでいます。
こんにちは、情報科学専門学校新横浜校の情報工学科3年の針北です。
僕は、岩崎学園の一員として、神奈川新聞島の運営スタッフとして参加させていただいています。
今回はセカンドライフの中にある神奈川新聞島でオープニングイベントが行われたので、そのことについて書きたいと思います。
イベントのことを書く前に、私がどのようにセカンドライフを楽しんでいるかを紹介したいと思います。
私のキャラクターは現在、このような感じ
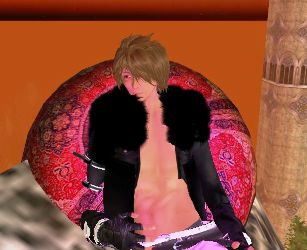
まぁ、ホストっぽいイメージなんですけど、まずは外見を自分好みにすることからはじめました。フリーでもいろんな種類の服だったり体のパーツだったりあるので、セカンドライフ内を探し回れば、絶対自分好みの姿に変装させられることができますね~。
ある程度自分好みになった後は、オブジェクトを作成していました。オブジェとを作成なんて難しい響きがするんですけど、やってみるとそんなに難しくはなく、結構楽しんです。私は椅子と熊のかぶりものなんかを作ったりしてみました。

椅子なんかは、四角い板をうまく張り合わせるだけでできるし、熊のかぶりものだって、丸い球体のオブジェクトを重ねるだけでできてしまうんです。なんて簡単(笑)
とまぁこのように今はオブジェクトを作成したりして楽しんだりしているんですが、セカンドライフをやっているみんながほしくなるようなオブジェクトを作り出せば、セカンドライフ内で作ったものとリンデンドルというセカンドライフ内のお金を交換して、手に入れたリンデンドルを実際のお金に換えることもできるんです!
自分の技術次第で、セカンドライフで副収入♪なんてことも可能なのが、世界中で人気の秘密なのかもしれませんね。
さて、長くなってしまいましたが、昨日行われたオープニングイベント!
といいましても、まだまだはじめたばかりのプロジェクトですので、花火が上がっているのと、ダンスステージでみんなで踊りながら会話することくらいしかまだありませんでした。
私もみんなにまじって踊ってみたので、その一枚を・・・(笑)

神奈川新聞ということもあり、ニュースなどの配信をセカンドライフ内でしていくので、セカンドライフに興味があって実際やってみたときには是非、神奈川新聞島に遊びにきてください!スタッフ一同お待ちしておりますっ。
こんにちは、情報工学科2年の淵山です。
前回の中村くんから引き続き、
今回は二足歩行ロボットの仕組みについて書かせていただきます。
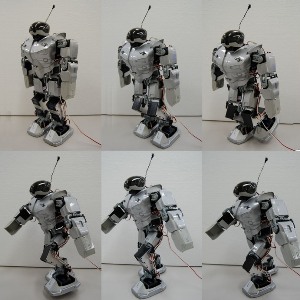
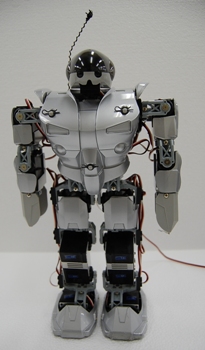
ボク達が使うロボットはこちら。KHR-2HVという機体。
「新横KID」と名付けています。
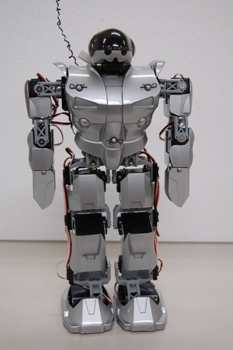
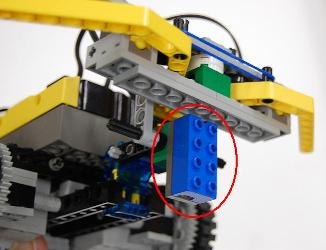
こけたときのショックを和らげるためと、コードがひっかからないように、
ポリカーボネート製の外装を着けています。
このロボットは各関節にサーボモータという部品を用いています。
サーボモータとは、自分の動作状態を常に確認し、フィードバック機構を利用して、指令とのずれが出るとすぐに修正してずれを直すかしこいモータです。
〔サーボモータ〕

このサーボモータで17箇所もの間接が稼動するようになっており、
各関節の稼動範囲を微調整する事により、様々なポーズをとらせる事が可能になります。
スムースな二足歩行以外にも、なんと腕立て伏せや側転、回し蹴り、勝利のポーズ、
果てはY字バランスまでもこなしてしまいます。
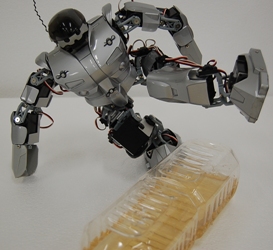
〔回し蹴り〕

〔回し蹴りでペットボトルを倒した〕
〔勝利のポーズ〕

〔Y字バランス〕

ロボットを制御するには、パソコンを利用して、
行動内容をロボットに学習させていく事が必要になってきます。
この学習させる行動内容を構築していくことこそが、
ボク達が目的としているロボットコンテストの重要なポイントとなってきます。
一歩前進させるだけでも各関節の細かい調整をすることにより、
カクカクとした歩行になったり、
はたまた流れるような足運びになったり・・・
コンテストではゴールまでのスピードを競うので、
この「微調整」という作業に悩まされる毎日になっています。
また、コンテストでロボットを操作する際に
無線を利用して遠隔操作をしていく事になるのですが、
この遠隔操作一つをとっても、
練習を積まなければコツを掴む事ができないため、
コンテスト本番までにどれだけ操作に慣れるかも重要なポイントになってきます。
ロボットに行動内容(モーション)を学習させていくことについては、次々回の、情報工学科ブログ:ロボコンへ向けて【006】で、和田君がお話をしてくれると思います。お楽しみに!!
こんにちは。教務部のヤマガミです。
以前、ご紹介させて頂いた、神奈川新聞島が本日グランドオープン致しました!
早速、SL(セカンドライフ)内のオープニングイベントに参加してきました☆
夕方・・・5時。
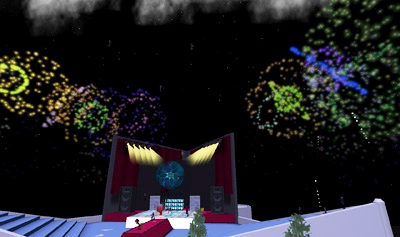
イベントでは、一万発の花火とダンスパーティーが開催される予定でしたが・・・・
仮想空間であるセカンドライフ内で花火一万発をどうやって上げるのか楽しみにログイン。
するとスピーカーから「ヒュ~ド~ンド~ン」と盛大な花火の音が!
なんとステージを振り返ってみると、キレイな花火が夜空を彩っているではありませんか!!
ちょっと感動しちゃいました。
空を飛んで花火に近づいてみたり・・・
海岸でビーチチェアに座って、観覧したり・・・
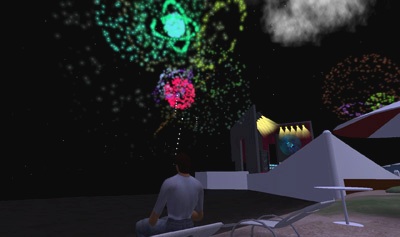
SLの中では自由にアバターを動かすことができます。
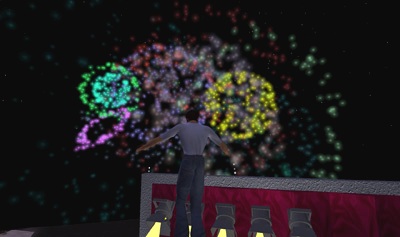
ステージの上は、ダンスパーティーで盛り上がっていました☆
はずかしけど、少しだけ参加してみました(w)

手前で華麗?なダンスをしているのが私です。
同じく教務部のカワカミさんも気が付けば、ポリスマンと一緒にダンスしていました☆

サンタの帽子がお気に入りのようです。肩には、ズームインスーパーでお馴染みのズーミンが
乗っています。
学生や職員、一般の方の参加も多く、とても盛大なオープニングイベントでした。
SL内では、リンデンスクリプトと呼ばれるプログラミング言語を使って、アバターや物体に動作を
設定することができます。実はあの素晴らしい花火もプログラミングされていたんですね☆
これからは、情報科学の学生がこのプログラムを駆使して、いろいろなことに挑戦していきます。
お楽しみに☆