
情報工学科2年生の佐々木と伊勢です。
12月23日に行われる第17回全国専門学校ロボット競技会(スチールファイト)自律走行ロボット競技(ソフトウエア部門)に出場します。
競技内容は、以下のようなコースを走るタイムトライアルです。
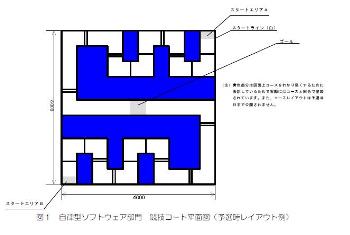
ライントレースではありませんが、シングルラインを読み取って右折、ダブルラインを読み取って左折します。走行体はLEGO MINDSTORMです。ハードウエアはどのチームも同じで、ソフトウエアの工夫が勝負です。僕たちはbrickOS上のC言語でプログラムを作成しています。
昨年度のチームが準優勝しているので、プレッシャーがありますが、コースは幅も全長も昨年度の2倍、走行体も昨年度と似ていますが車輪やギアが変わったので、スピード感が全然違います。昨年度のチームのことは忘れて、チャレンジャーとして臨みます。
(昨年度仕様) (今年度仕様)

(ギア比が変わったので、今年のモデルはスピード感があります。計算上は昨年より5倍速いです。)
11月末までは、外部向けのLEGO MINDSTORMSを使った小中学生対象の講習会が一杯あったので、今年度の仕様の走行体を組み立てたのは、実は今日(12/3)が初めてです。昨日までは、コースづくりをしていました。1年生の箱崎君にも手伝ってもらいました。ありがとう。
伊勢君がコースの線引きをして 僕がカッターで切断して

1年生の箱崎君がコースを作ってくれました。

完成したコースです。昨年度の2倍の大きさです。存在感があります。

さっそく試運転です。

昨年度と比べると道幅が広いので直進からそれたときの心配ばかりしていましたが、むしろ高速走行なので、ラインを読み取れなかったりするほうが心配です。それでも、今日、初完走できました。40秒でした。実際にコースを作って動かしてみると、昨日までとは全然違う面白さを感じてきました。わくわくどきどきしてきます。バーチャルな世界でアルゴリズムやプログラムばかりいじっているのと、実際のリアルなものを動かすことの違いはこういうことかと体感しています。
僕たち2年生チームは、1年生の勢いに押され気味ですが、「僕等の実力を見せてやる!」とファイトがわいてきました。
トラックバック
このエントリーのトラックバックURL:
http://blog.iwasaki.ac.jp/mt/mt-tb.cgi/1380